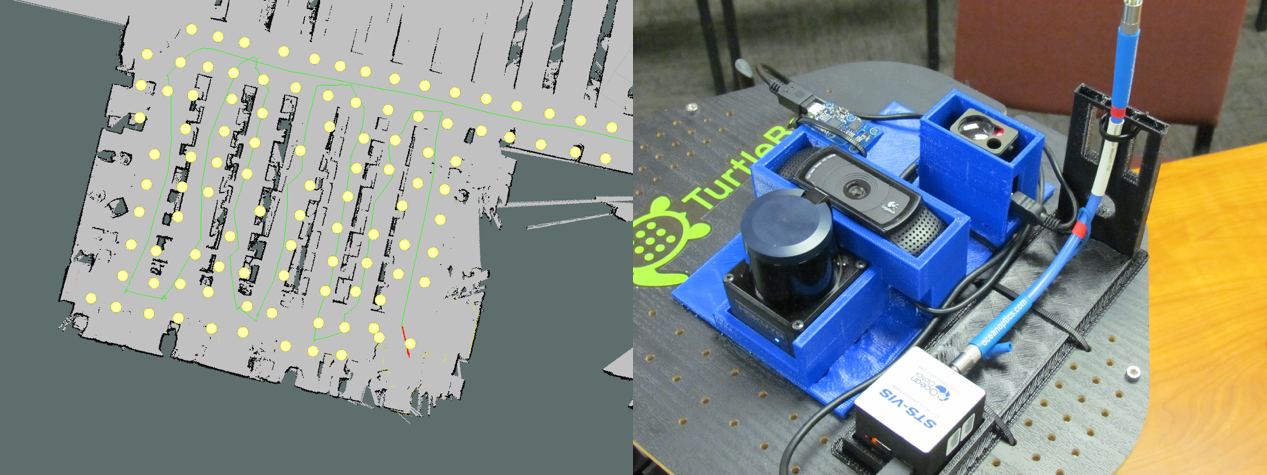
 Left: Building mapping and lighting audit result. Right: Sensor Configuration.
Left: Building mapping and lighting audit result. Right: Sensor Configuration.Autonomous Lighting Audits
We developed a robot that automatically finds lights in a building using a camera and identifies their types using a spectrometer. The robot localizes itself and creates a map of the building through Simultaneous Localization and Mapping (SLAM) using a distance sensor. Developed wih C++ using OpenCV on the ROS platform. [Video] [Demo] [Report] [Poster].
Team Composition
Methodology
Reflection
This was an important experience for me, as it was in this team that I met someone who was really passionate in doing research. He would ultimately influence my passion to do research.